 ���ں�
���ں������ڹ㷶Χʵ����ά����Ʋ��3D LiDAR
2017-09-12 11:27:49
- +1 ������
���켫���ҵ�Ƶ�������� Ҫ�� ���µ�����ҵ��ʽ�����������Ӻͻ���ϵͳ��˾����������ά���봫����3D LiDAR[1]�����ܹ���ȷ�Ʋ�ֱ����Χ����ľ���ͷ�������Ʒͨ�����ö����ṹ�ļ���ɨ�輼����ʵ���˴�ֱ����60�ȡ�ˮƽ����270�ȵĹ��ɨ�衣ͨ���������Ʋ�ռ䣬Ϊ�����ƶ�������[2]���ȶ���ʻ�������ס�

��Ч ���� ������Ʒ��ֱ����ļƲⷶΧ�ر�㣬��Ӧ���������ƶ�������ʱ������ȷ���·���ϵ��ϰ����·��İ�״̬�����⣬���ڿɸı�ɨ�跶Χ�ͷֱ��ʣ������ʵ���ʺ������ó����ļƲ⣬Ϊ����������������ʩ�ںͻ�����ʻ�������ƶ������˵��ռ��������ס�
���� �㡿 ������ƷӦ�ò��ö����ṹ�ļ���ɨ�輼�������������ص㡣
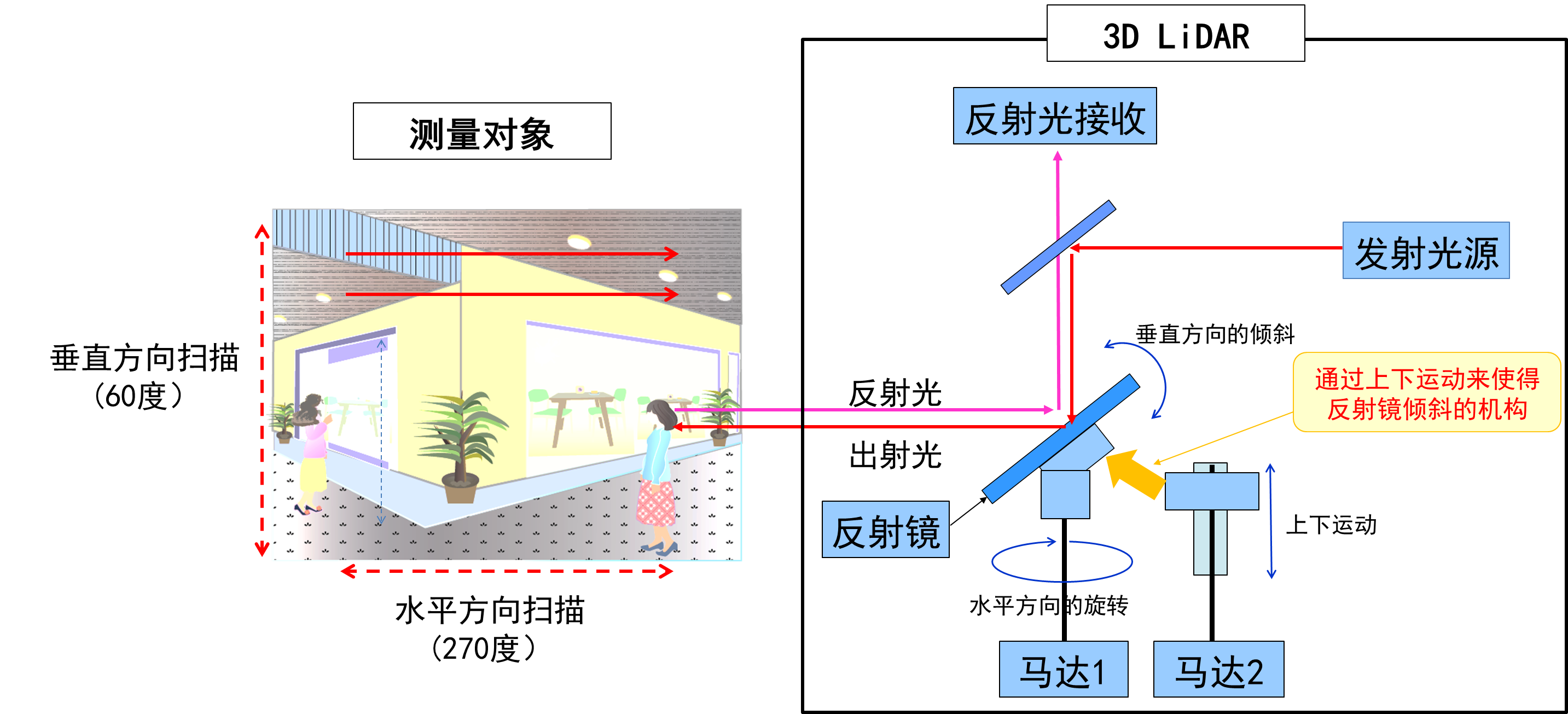
1. ʵ�ֹ㷶Χ����ά����Ʋ�(��ֱ����60�ȡ�ˮƽ����270��)
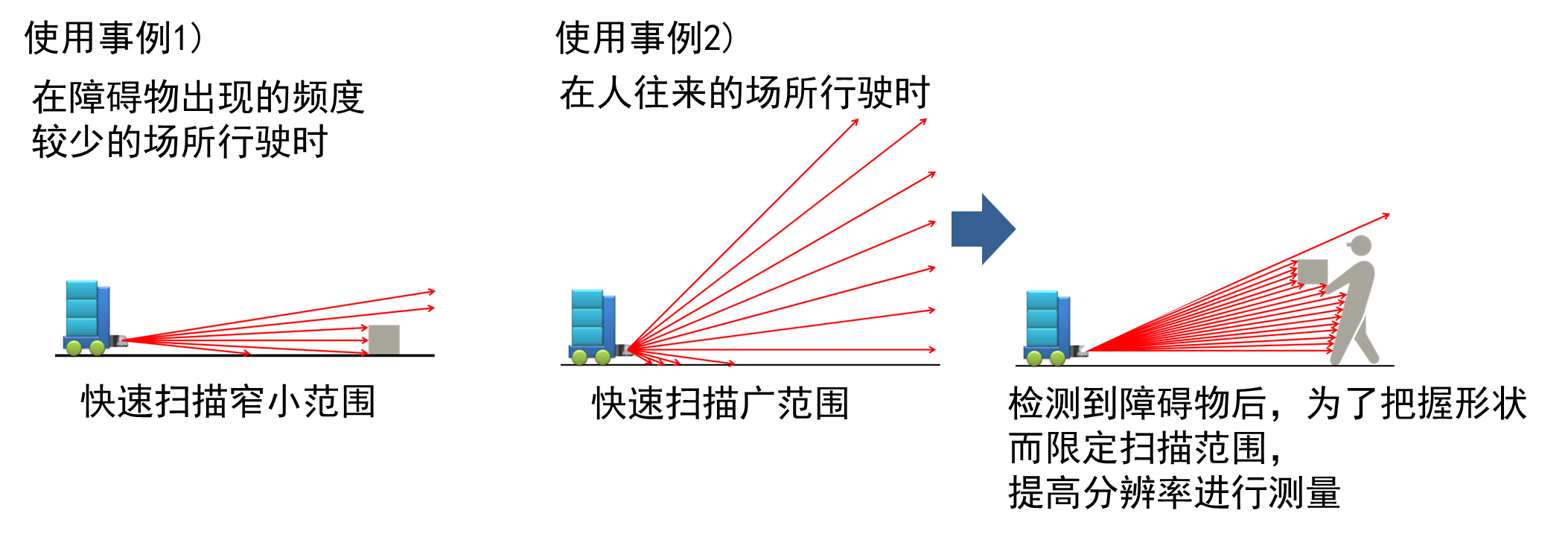
2. �ɽ��д�ֱ�����ɨ�跶Χ���ֱ��ʵ������趨
3. ��ʹ�����ջ�����Ҳ�ɽ��и߾��ȼƲ�
����ȥʾ���� Ҫʹ�û�����������������ʩ�ںͻ��������ƶ���������Ҫ���ջ����˵�ǰ�������ҷ����һ���Ҫ����·��״����������;��ʹ�õ�3D LiDAR�����ڼ���Ĵ�ֱɨ�跶Χ���㣬������һ������δ����ȷ����·��״���������Ҫ������������������ϡ���ˣ���������ʻ����ϵͳ�Ĺ��ɸ��ӵĿ��⡣
���� ;�� �����ƶ�������(�Զ����˻����ͻ������˵�)���泵��ũҵ��е��������е������ϵͳ
��ʵ�û��� ��Ʒ����Ԥ����2018��1��
���� ע�� ����Ʒ����2017��10��3�ա�10��6����Ļ�Ź���չ���ݾٰ�ġ�CEATEC JAPAN 2017����չ����
����Ʒ��ѯ��
���`�ȥ�`�ƥ���&��������ȥꥢ�륷���ƥॺ�� ��������ȥꥢ���I�_�k���`
e-mail: lidar3d_info@ml.jp.panasonic.com
����Ʒ����ϸ��Ϣ��
https://industrial.panasonic.com/ww/products-rd/3dlidar?ad=press20170911C
���ص��˵����
1. ʵ�ֹ㷶Χ����ά����Ʋ�(��ֱ����60�ȡ�ˮƽ����270��)
������;��ʹ�õ�3D LiDAR������ϣ�����㷶Χ�Լ�·��״���Ĺ�ҵ��;�������Ҫ��δ��ͨ����һ��������Ӧ�ԡ�����˾ͨ����Ч�����ڹ�����������ҵ����ֲ�����Ĺ�ѧ��Ƽ�����������Ƽ������������˲��ö����ṹ�ļ���ɨ�輼����ͨ����һ��Դʵ���˴�ֱ����60�ȡ�ˮƽ����270�ȵĹ��ɨ�衣�ɴˣ��ɽ����ڵ�һ�����������й㷶Χ����ά����Ʋ⣬����������������������ϣ��ɼ������ƶ������˵���ʻ����ϵͳ�Ĺ��ɡ�
<����˾����ɨ�輼�� ��Ҫͼ>
2. �ɽ��д�ֱ�����ɨ�跶Χ���ֱ��ʵ������趨
�����ƶ��������ϣ�������ʻ������ʱ��Ȼ������ϰ���������ķ�Χ�ᷢ���仯��Ʃ�磬��·��û�а����ϰ�����ֵ�Ƶ���ٵij�����ʻʱ��Ҫ������������ϸ���·��״�������ݻ����˵���ʻ�ٶȿ��ٵض�խС��Χ����ɨ�衣һ���棬���������ij�����ʻʱ��Ҫ����մ�·��ֱ���൱�ڻ����˸߶ȵĹ㷶Χ��״�����������ڼ��ϰ���ʱ����ʱ����Ҫ�����ϰ������ϸ��״��������Ʒͨ�����ö����ṹ�ļ���ɨ�輼�������ԴӶ���ģʽ���趨��ֱ�����ɨ�跶Χ�ͷֱ��ʡ��ɴˣ���ͨ���ʺ������ó�����ɨ�跶Χ�ͷֱ��������о���Ʋ⣬ʵ�ֻ������ȶ�����Ч����ʻ��
<ʹ������>
3. ��ʹ�����ջ�����Ҳ�ɽ��и߾��ȼƲ�
�ڻ���ʹ�û�����ʱ��Ҫ��ʹ�����ջ�����Ҳ�ܹ�ʹ�á�������Ʒͨ�������伤����������巴����·�������ͬһ����ѧ·���ϵļ����ֶμ���̫������������������ʹ���൱��ʢ�����ո��յ�100,000�տ�˹[3]���ն���Ҳ�ɽ��и߾��ȵļƲ⡣
<���ջ����µIJ������>

(����Ӱ��ͼ���ң�����˾3D LiDAR�Ʋ���)
������Ʒ�Ĺ��
��Ŀ����
ɨ�跶Χˮƽ270�ȡ���ֱ0��60��(�ı�)
��ֱ�ֱ��ʿɴ�1.5��/3.0��/7.5����3���н���ѡ��
�����뷶Χ0.5m��50m
֡Ƶ5fps��25fps
��Χ�նȡ�100,000�տ�˹(̫������)
���γߴ��130mm����120mm������140mm
������˵����
[1] LiDAR (Light Detection and Ranging)
����������ļ����������������Ĺⷵ��Ϊֹ��ʱ�����Ʋ����Ĵ�������
[2] �����ƶ�������
���ڴ����,GPS,��ഫ�����ȸ����豸�õ���ͼ��λ����Ϣ�ﵽ��·��,�ܿ��ϰ����ͬʱ,�ƶ������Ⱦ�����Ŀ�ĵص����������ͻ�����.���Զ������Լ��ͻ������Ȳ���������г�Ӧ���ϱ��ڴ�
[3] �տ�˹
�ӹ�Դ�����ļ���,���䵽����ʱ�������̶ȵĶ��������õ�,��ν���նȵĻ�����λ










������Ѷ
������Ƶ
��Ʒ����
 X
X

 ����֤��¼
����֤��¼
 QQ�˺ŵ�¼
QQ�˺ŵ�¼
 ���˺ŵ�¼
���˺ŵ�¼






























